-
[인공지능] Partial observable search인공지능 2020. 12. 3. 22:40728x90
Partial observation(Local sensing)
지금까지의 vacuum problem 또한 partial observation 임. 옆 방의 dirty 정보를 알 수 없기 때문

따라서 [A, Dirty] percept 가 있으면 1, 3 상태 모두 가능함 → Belief state
{1, 3} 을 initial state 로 갖는 문제로 재정의 → 기본적인 방법은 No observation 과 동일
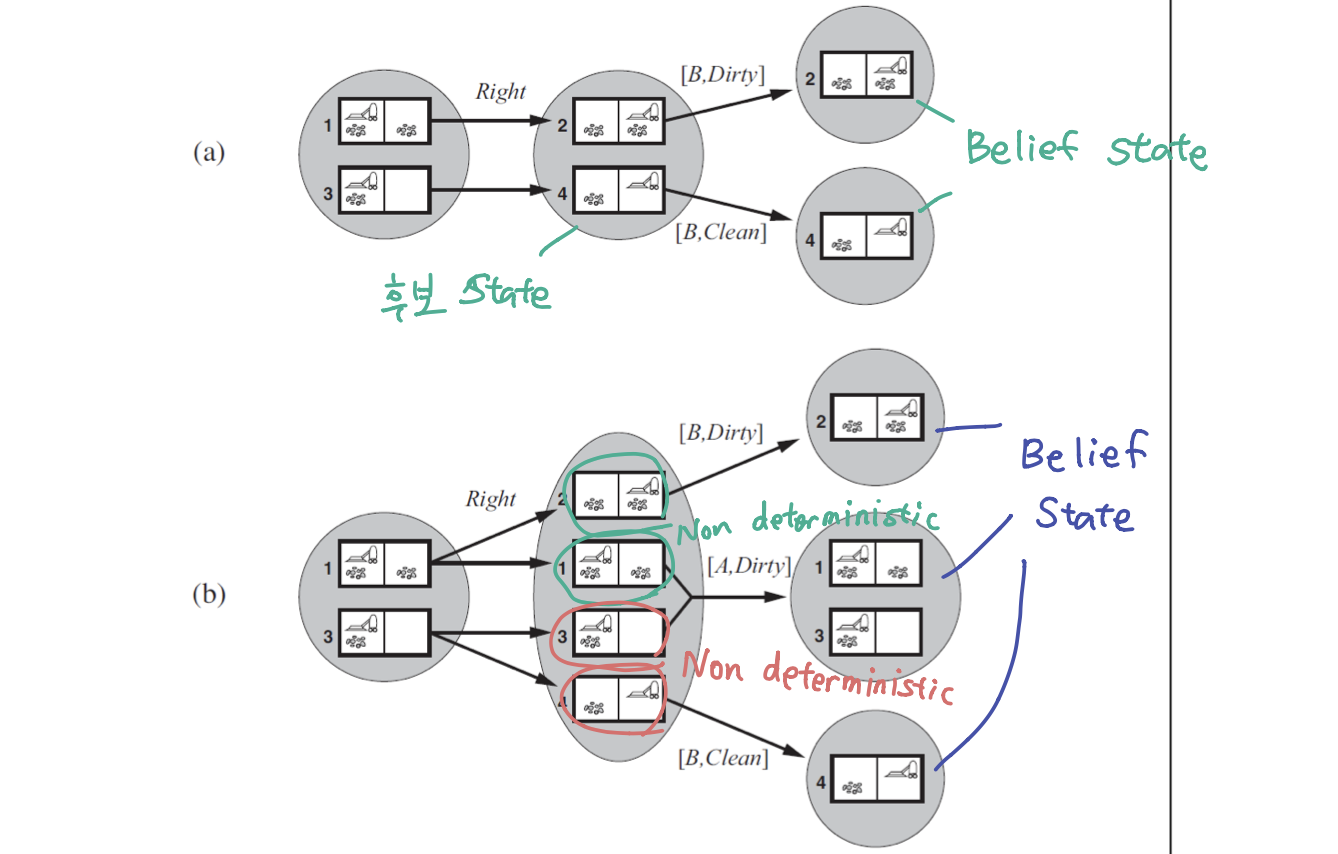
b 는 slippery world 로, vacuum agent 가 움직이는데에 실패할 수 있음
belief state 에서 각 state 마다 적절한 action 을 취함

Initial percept : [A , Dirty]
Initial belief state : {1, 3},
Solution = : [Suck, Right, if Bstate = {6} then Suck else []]
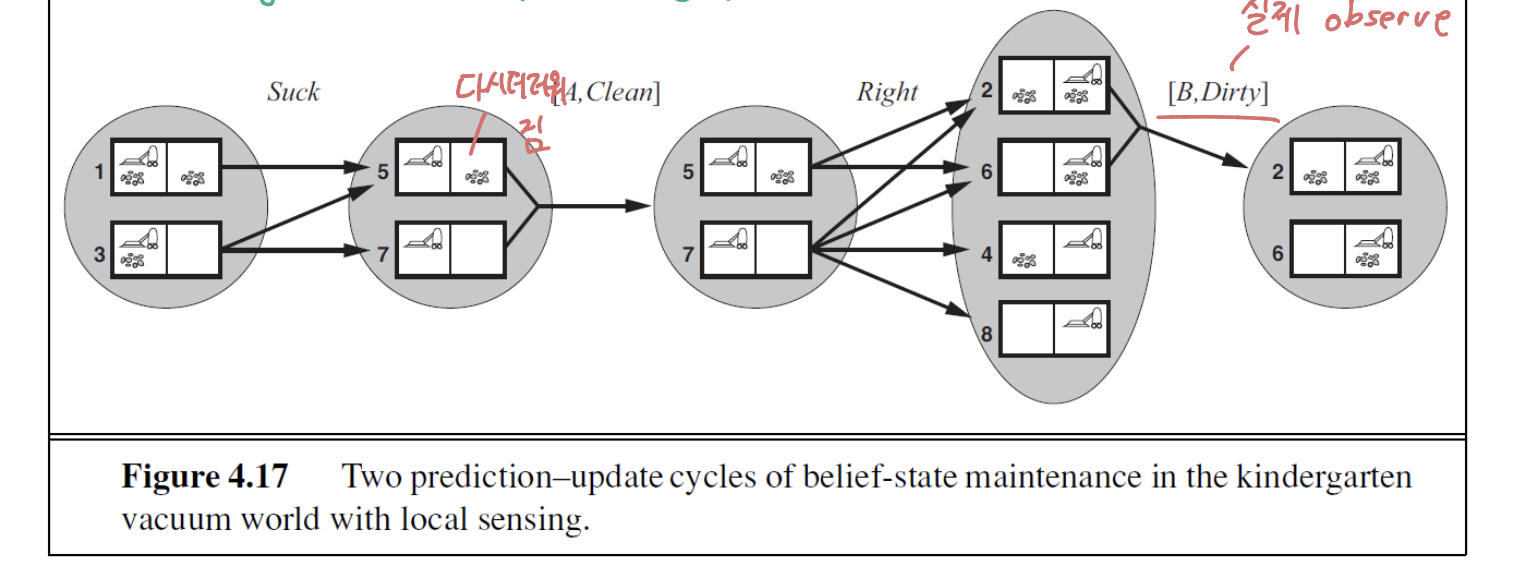
Partially observable 은 결국 Contingency plan 으로 답을 구함
Agent 가 내부적으로 belief state 를 유지하는 것이 중요
위 예제는 방이 언제든 다시 더러워 질 수 있는 vacuum world
belief state 를 유지하고, percept 를 분석함으로서 현재 state 를 알아낼 수 있는 좋은 예제
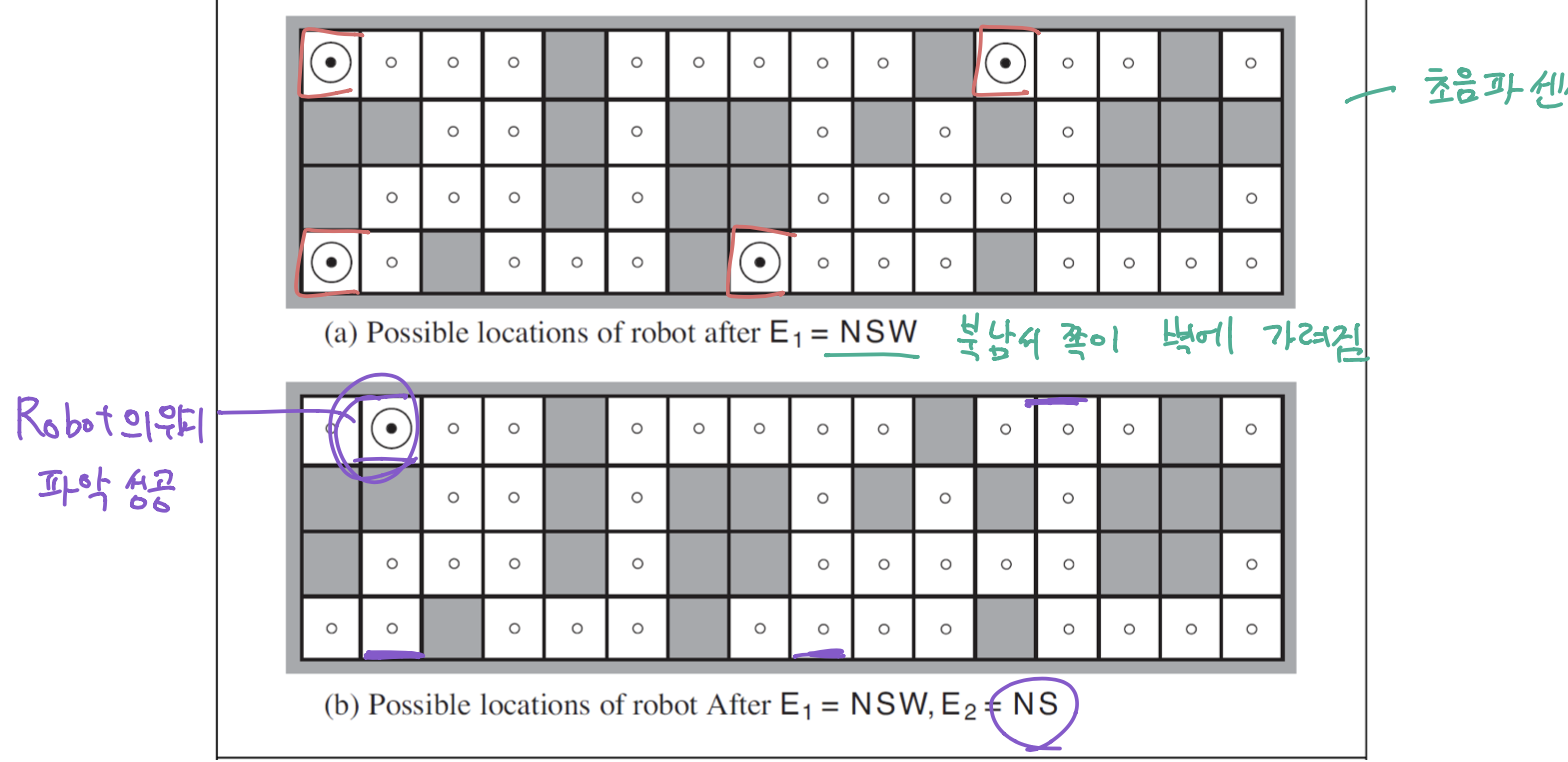
첫 percept로 NSW에 벽이 있음을 감지 → belief state 가 4개로 추려짐
두 번째 percept 로 NS에 벽이 있음을 감지 → belief state 의 negibor 중에서 NS인 곳은 한 곳 뿐임 → 위치 특정 완료
'인공지능' 카테고리의 다른 글
[인공지능] CSP 문제 (0) 2020.12.05 [인공지능] Game AI 이론 (0) 2020.12.05 [인공지능] No observation searching (0) 2020.12.03 [인공지능] And-Or Tree (0) 2020.12.03 [인공지능] Genetic 알고리즘 (유전 알고리즘) (0) 2020.12.02