-
[인공지능] No observation searching인공지능 2020. 12. 3. 22:09728x90
No observation searching
percept 가 없음
이러한 문제를 Sensorless 또는 conformant 문제라고 함
Sensorless vacuum cleaner
현재 청소기가 어느 방에 있는지, 방이 깨끗한지 더러운지 알 수 없음
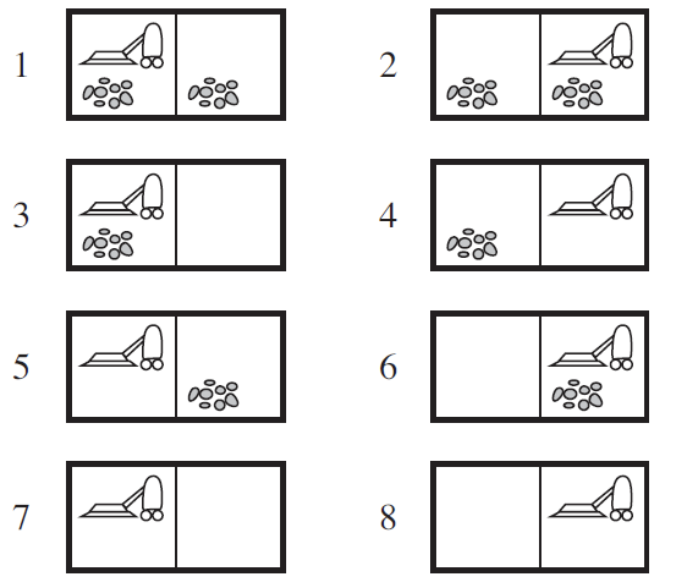
initial state : {1,2,3,4,5,6,7,8} → 이 모든 state 가 belief state
After “Right” : {2,4,6,8}
After “Suck” : {4, 8}
Solution : { Right, Suck, Left, Suck }
현재 state 는 알 수 없지만 Action 으로서 belief state 의 수를 줄여나가는 것이 핵심
Fully observable problem 에서 Sensorless problem 으로 변환하여 문제를 풀어나감
문제 정의
-
State, Initial state
-
Physical state : 원래의 state → Physical state 의 수 = N
-
새롭게 정의되는 state(P) 는 physical state 들의 모든 조합 → Belief state = 2N
-
새롭게 정의되는 Initial state 는 모든 physical state 를 가진 state
-
Action
-
P 의 각 원소(state)가 취할 수 있는 모든 action 의 set
-
Transition model (d)
-
Deterministic : d = {s’ : s’ = RESULT(s, a), s ∈ b} (b = belief state, s = physical state)
각 state 마다 action 을 취해서 나오는 모든 successor 를 말함 -
Nondeterministic : d = {s’ : s’ ∈ RESULT(s, a), s ∈ b} (b = belief state, s = physical state)
-
Goal-test : belief state 의 모든 원소 state 가 goal test 를 통과해야 goal
-
Step-cost : action 의 cost 가 모두 같다고 가정

Belief state 도식

이론적으로 belief state 는 28 으로 256개이지만 실질적으로 도달 불가능한 state 를 빼면 12개 뿐임
Belief state 에서의 Graph search
Tree search 보다는 graph search 가 더 효율적임
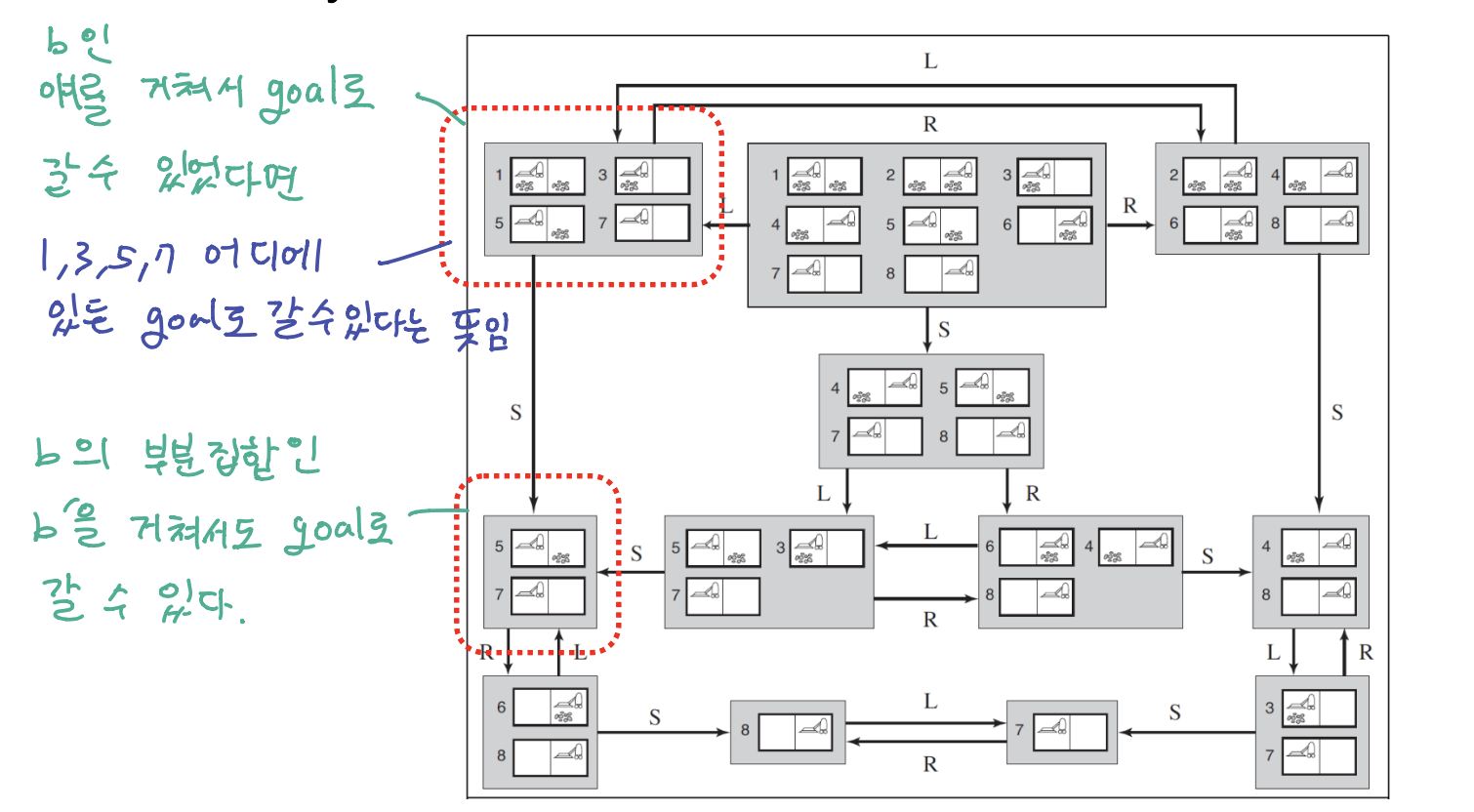
b` 이 b의 부분집합이라고 하자
b 를 거쳐서 goal state 로 갈 수 있다면 b`을 거쳐서도 goal 로 갈 수 있다.
대우 : b` 을 거쳐서 goal 로 갈 수 없다면 b 또한 갈 수 없다.
Graph search 에서는 frontier 에 이미 들어갔던 노드에 대해서는 중복 검색하지 않음
만약 b`이 있다면 b 는 frontier 에 넣지 않을 수 있기 때문에 Tree search 보다 효율적임
b 가 frontier 에 들어가야하는 조건은 b`은 goal에 도달할 수 없으나 b는 도달할 수 있는 경우이며, 이 경우는 대우명제에의해 모순임
'인공지능' 카테고리의 다른 글
[인공지능] Game AI 이론 (0) 2020.12.05 [인공지능] Partial observable search (0) 2020.12.03 [인공지능] And-Or Tree (0) 2020.12.03 [인공지능] Genetic 알고리즘 (유전 알고리즘) (0) 2020.12.02 [인공지능] Annealing, Local beam search (0) 2020.12.02 -