-
[인공지능] Hill climbing search인공지능 2020. 12. 2. 23:50728x90
Local Search
Path 에는 관심이 없고 Goal 자체를 찾는게 목적일 때 사용
h(n) : heuristic 함수
Hill-Climbing Search
Steepest descent(ascent) 알고리즘 : 가장 가파른 알고리즘
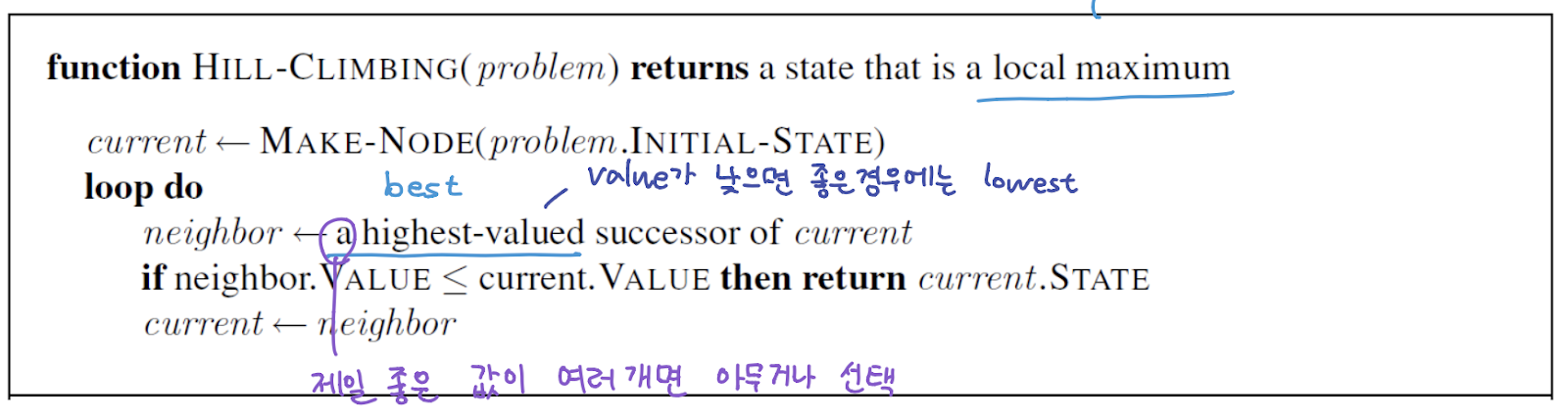
현재 노드의 후임자(successor) 중에서 가장 좋은 값이 현재 자신보다 좋으면 이동하는 알고리즘
더 이상 자신보다 좋은 successor 를 발견하지 못하는 순간 종료
8-queen example
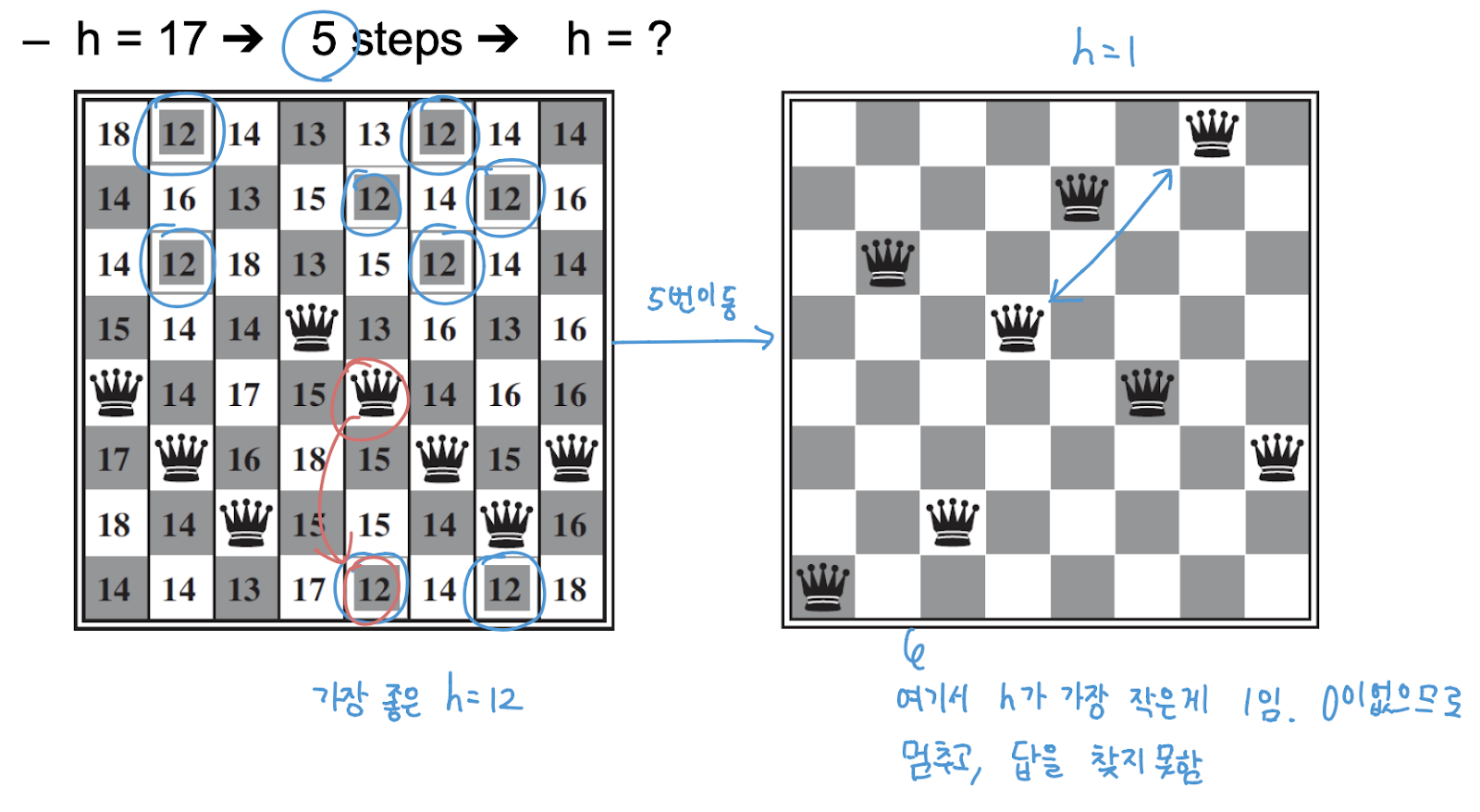
queen 을 옮겼을 때 서로 공격할 수 있는 queen 의 수를 h(n) 으로 사용한 결과 정답을 찾지 못하는 문제를 발견
State-space landscape
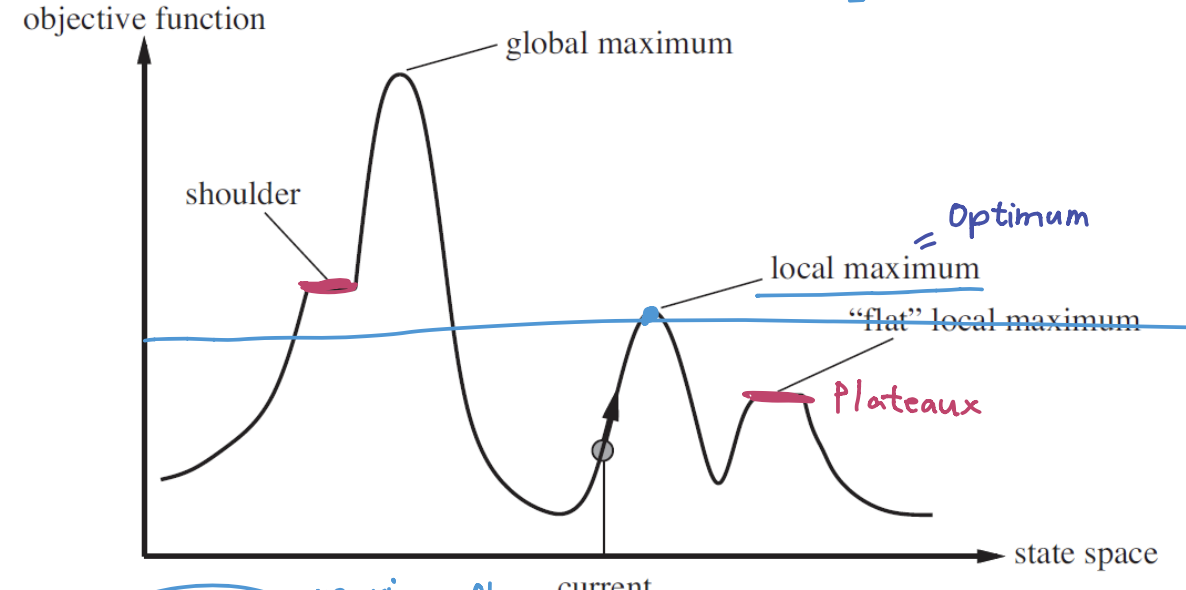
클 수록 좋은 값을 찾는 문제에서 Hill-Climbing 알고리즘의 문제점을 보여주는 landscape
현재 위치에서 Greedy 하게 움직이다보니 global maximum 을 찾지 못함
Local maximum : 주변에서는 제일 좋지만 global maximum 보다는 나쁜곳
Plateaux, shoulder : 평평한 local maximum
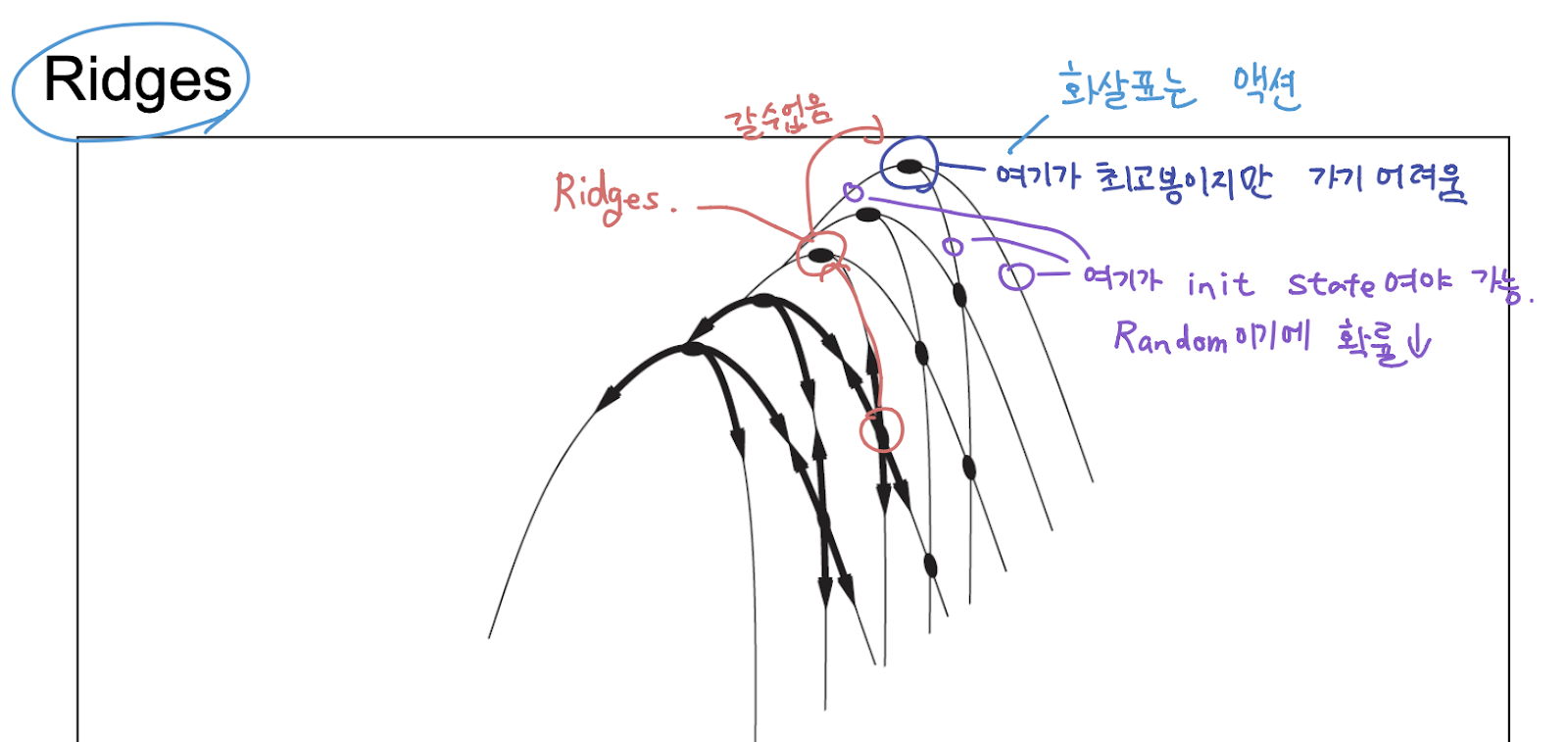
Ridges
Sideway moves
8-queen 문제의 경우 86% 확률로 정답을 찾지 못함
goal 을 찾으면 평균 4번, 찾지 못하는 경우(Local maximum) 3번만에 알고리즘이 끝남
Plateaux 에서도 움직일 수 있는 Sideway moves 를 허용한 8-queen 은 6%확률로 정답을 찾지 못함
goal 을 찾으면 21번, 찾지 못하는 경우에는 64번만에 알고리즘이 끝남
단 sideway moves 를 할 때 plateaux 에서만 무한으로 왔다갔다 할 수 있으므로 이동 횟수를 제한해야함
Stochastic hill climbing
h(n) 이 좋을수록 해당 노드로 이동할 확률은 높지만 100%는 아님
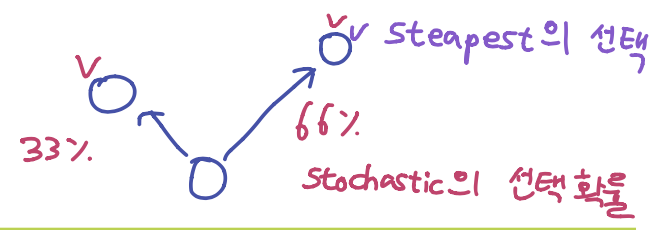
100% 보장까진 아니지만 운이 좋다면 local maximum 문제를 회피할 수 있음
First choice hill climbing
hill-climbing 과 비슷하지만 기존의 것은 모든 successor를 만들어 두고 가장 최적의 것을 골랐음
하지만 successor 가 엄청나게 많은 경우 이는 부담이므로 successor 를 생성하다가 자기 자신보다 좋은 것을 발견하면 바로 이동함
Random restart hill climbing
init state 의 위치를 바꿔가면서 수행하는 알고리즘
global goal 을 찾을 확률 p, 평균 실행횟수 n
1번 성공했을 때 평균 실패 횟수 = 1/p - 1 = (1 - p) / p
8-queen sideway move 허용 안한 경우
성공 시 평균 4회, 실패 시 평균 3회 알고리즘 수행. p = 0.14
falure = (1 - 0.14) / 0.14 = 약 6
평균 알고리즘 시도 횟수 : 1(success) * 4 + 6(failure) * 3 = 약 22회
8-queen sideway move 허용 한 경우
성공 시 21회, 실패 시 평균 64회 알고리즘 수행. p = 0.96
falure = (1 - 0.96) / 0.96 = 1/24 = 약 0.04
평균 알고리즘 시도 횟수 : 1(success) * 21 + 0.04(failure) * 64 = 약 25회
따라서 sideway move 허용 안한 경우가 더 효율적임
Hill climbing 정리
-
Local max 와 plateaux가 적으면 좋은 알고리즘
-
대부분의 알고리즘은 local max, plateaux 가 많음
-
따라서 적당히 좋은 local-maximum 을 찾는것으로 타협
-
incomplete : 반드시 goal 을 찾는다는 보장은 없음
'인공지능' 카테고리의 다른 글
[인공지능] Genetic 알고리즘 (유전 알고리즘) (0) 2020.12.02 [인공지능] Annealing, Local beam search (0) 2020.12.02 Local search, Hill-climbing search (0) 2020.10.17 AI heuristic sub problem, Learning (0) 2020.10.17 Heuristic 과 Relaxed problem (0) 2020.10.17 -